
如雨後春筍一樣,汽車界的巨頭們迫不及待地挨個向媒體和世人展示並闡釋自己在高度自動駕駛方面已經取得的成就——上個月24日,德爾福改裝了一輛奧迪Q5從舊金山出發,一路自動駕駛前往目的地紐約,4月2日順利抵達;上週末沃爾沃則在北京高速上做了實際道路的自動駕駛體驗活動;本週二寶馬(中國)在大本營佳程廣場與媒體進行了一場關於寶馬自動駕駛科技的媒體溝通會。儘管寶馬沒能像沃爾沃一樣令媒體們親身體驗寶馬的自動駕駛科技成果,但由技術官員耐心和細緻地闡釋了高度自動駕駛科技的緣由和實現路徑以及挑戰,亦讓虎嗅君受益匪淺。
於是虎嗅君借花獻佛,將此次媒體溝通會的部分實錄整理如下,一起通過寶馬的視角瞭解下已經「迫在眉睫」的高度自動駕駛要如何實現。
以下為寶馬(中國)服務有限公司研發部副總裁馬策(Mr. Mance Nevijo)先生的講解實錄。
為什麼要做自動駕駛:安全、節能
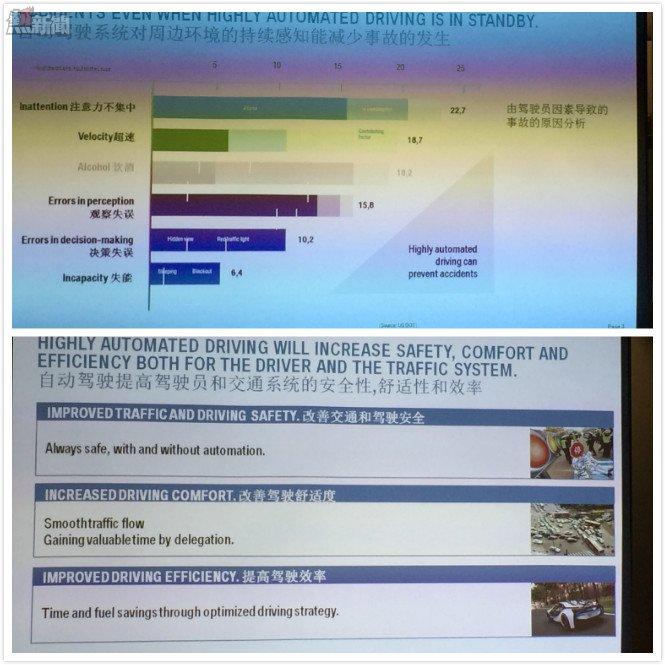
有很多事故都是由於駕駛員注意力不集中引起的,或者人的一些錯誤,包括在觀察上的失誤、決策上的失誤,或者駕駛員失去駕駛能力的情況,這都是一些人為的因素。所以說安全是我們做自動駕駛最大的原因之一,因為機器不會酒駕,機器也不會睡著了,機器也不會犯一些注意力不集中的錯誤。
第二個好處,可以減少能源的消耗。車輛通過判斷道路交通情況能夠進行一些優化的管理,比如說優化車輛的動力,還有規劃節能型的路徑,提高駕駛的效率,節省燃油。
哪些先決條件來確保自動駕駛的實現
首先需要後台的服務,當然還需要車載智慧系統,車包括傳感器的技術、數據融合的技術。對於後端服務器系統我們有一些很強的本地合作夥伴,你們可能都知道我們跟百度有一個合作的研究項目,既然後台系統和車載系統都已經準備好的情況下,這些資訊都會彙集到車載系統當中去,有了這些資訊以後,車載系統首先做的就是感知車輛在交通道路上的位置,定位以後下一步就要感知周圍的環境,就是說周圍是什麼樣的狀況,我的車在環境中處於一個什麼樣的位置。
這個圖(見下圖的中上小圖)是計算機生成一個俯視圖,綠色的部分就是道路的部分,紅色的部分車載傳感器掃描出來建築物和行人,圖中間檢測到前面車輛代表的符號,基本上車載傳感器通過雷達掃描、鐳射掃描會把周圍的環境建模起來,讓這個車輛非常清楚周圍有哪些物體的存在。
我們總結一下前面四步:
第一步,車載傳感器提供一些資訊。
第二步,車載系統會接受到後台系統發過來一些資訊。
第三步,結合這些資訊可以定位自己在什麼地方。
第四步,車載系統會把周圍環境也建模起來,這樣就知道自己到底在什麼樣的環境中。
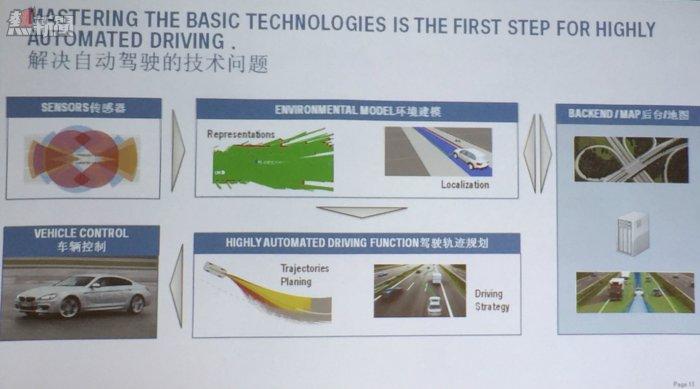
前面這四步都準備好了以後,下一步車輛智能系統要規劃一個駕駛策略,去決定在目前環境下,目前的位置下,什麼樣的駕駛策略是最好的駕駛策略,然後根據這個策略規劃出一些行駛路徑,再從中選擇出最好的一條行駛軌跡。這裡相當於涉及到了高度輔助駕駛系統和高度自動駕駛系統的主要區別。
對於高度自動駕駛來說應該能夠自己規劃路線,能夠進行車道的變化,而且可能需要高精度的地圖在後台進行支撐。
最後一步也就是關鍵性的一步,車輛智能系統一旦決定行駛軌跡以後,就會通過車輛的控制單元去沿著這個軌跡進行行駛。以上就是說明高度自動駕駛背後存在著怎樣的智慧技術。
自動駕駛的眼睛:傳感器
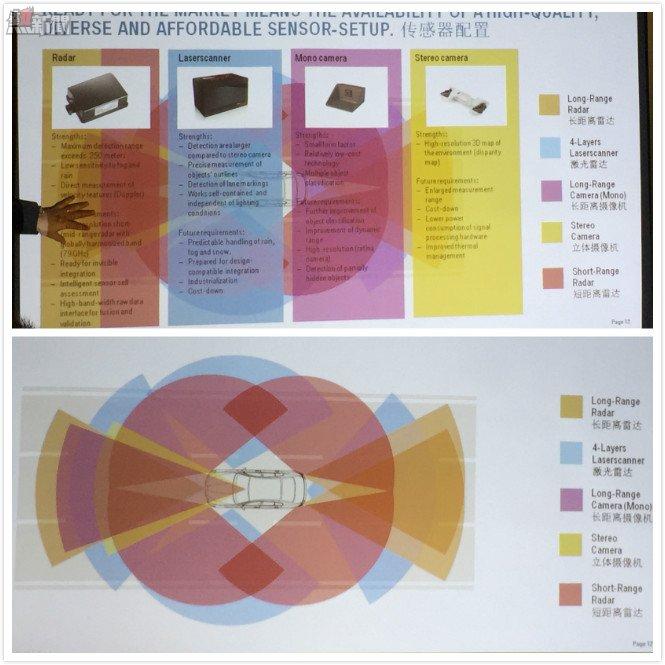
接下來我們簡單介紹一下車輛上面有哪些傳感器。
首先是雷達傳感器,包括長距離雷達傳感器和短距離雷達傳感器。長距離能夠檢測250米的距離,短距離檢測車輛周圍的情況,就是前面、後面和側面的情況。
下面介紹一下鐳射雷達,鐳射雷達在我們的研究車上有四個,前後左右各有一個。可能大家都注意到像穀歌、百度他們研究一些自動駕駛車輛在頂部有旋轉鐳射雷達,對於寶馬來說,我們不希望在車輛頂部還有東西,所以我們從研究階段開始把傳感器整合到車體內部。
我們在研究過程中還在使用一些單目攝像頭和立體攝像頭,通過研究結果最後會決定到底是哪種攝像頭動自動駕駛是最好的選擇。大家可能需要瞭解一點,目前我們在研究階段使用的這些傳感器可能不是最終量產車上使用的,因為這些研究階段的傳感器非常昂貴,還都是原型狀態。
自動駕駛的大腦:後台系統和車載系統
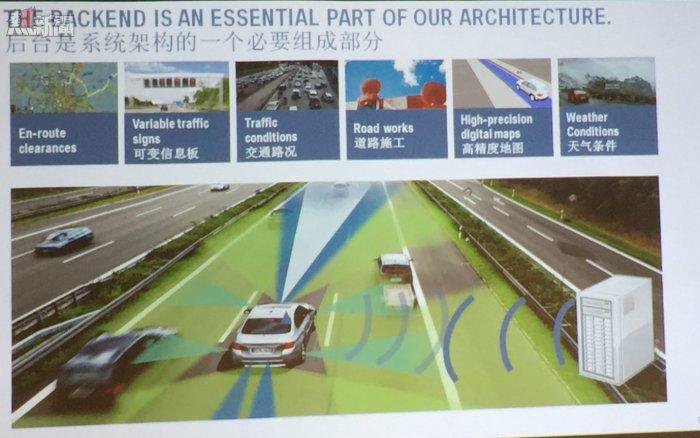
下面來介紹一下後台系統的重要性。我們剛才提到節省能源是非常重要的一個因素。所以通過後台系統感知交通資訊,我們能夠規劃全程路徑。車載傳感器可能感知到前後幾百米的距離,但是對於旅途中前面幾公里的地方是感知不到的,所以我們需要通過後台系統傳一些資訊到車載系統裡。另外後台系統可以提供的,是關於限速資訊動態的變化以及其他資訊,例如交通狀況、道路施工狀況和天氣條件,這些資訊對於我們駕駛人也是非常重要的,這些都是可以通過後台系統提供的。
目前車載計算機的能力不足以處理這樣的情況,但是我們根據摩爾定律,每隔兩年(虎嗅注:應為18-24個月)計算機的計算能力會翻倍,這也就是說大概十年以後,我們車載系統運算能力是現在車輛的30倍或者更高。可能你們現在感興趣我們下一步要怎麼實現這個。
我們認為一個關鍵的技術是通訊能力,目前是一個短板,我們必須要保證通訊的實時性,數據必須百分之百傳送出去,目前在這方面實施完全的資訊檢測、資訊的分發,還需要有一個挑戰需要解決。對於我們車載電腦,我們車廠還面臨一個挑戰,車載電腦使用的環境相對是一些惡劣的環境,比如零下幾十度到零上幾十度,這個電腦要非常完美的工作,所以它處理起來路面上的環境相對複雜一些,這也是挑戰之一。
民用級的電腦雖然速度很快,但它的晶片可能要需要一些加固才能用到車載上,離車載還有一段距離。

虎嗅注:大圖是網上找到的寶馬自動駕駛車輛後備箱內的「處理系統」,小圖是上周沃爾沃自動駕駛測試車輛後備箱內的「處理系統」。相似之處就在於印證了馬策所言的適合車載的高性能晶片及保證與雲端實時通訊的設備離車載應用尚有距離——還不能輕量化地內置到車載系統中。
自動駕駛的「知識儲備」:高精度地圖
最後一點,也是最關鍵的一點,高精度地圖,這也是我們目前的高度自動駕駛和市面上的高度駕駛輔助之間的主要區別,高度自動駕駛必須要依賴於高精度地圖。在中國有一個特殊的地方,關於地理資訊採集的問題,比如GPS資訊,自動駕駛車輛本身配備了一些傳感器,自動駕駛不可避免需要實時採集數據建模,這個問題在中國可能比較敏感一些,在國外可能採集一些數據是放開的,在中國目前高精度地圖沒有放開,即使給地圖廠商目前還沒有放開高精度地圖的採集,但是各個地圖廠商都是在準備生產高精度地圖。去年9月份我們跟百度簽約,在中國合作進行高精度地圖的研發和合作。
我通過一個例子跟大家解釋一下。想像我的車跟在一輛大卡車的後面,卡車上可能掉了一些貨物下來,可能我的車輛自動檢測到貨物遺灑的情況,將這些信息實時上傳給後台系統,這個後台系統可以把這些資訊再傳給跟在我後面的車輛,這個司機可以提前預知到前面有貨物遺灑,可以讓他有更好的準備來應對這種情況。
自動駕駛撞了人,怎麼算?
現在我們來討論一下,為什麼會面臨挑戰,因為這個挑戰,剛才說的一些技術上的挑戰,但不完全是技術上的挑戰。
其中一個重要的,監管法律的挑戰,這不光是中國的問題,也是全球化的問題,在目前機動車的法律框架下,可能自動駕駛車輛生產出來以後沒辦法進行認證上路。改變這個法律大家可以理解,肯定會是一個非常漫長的過程。
第二個,車子上路以後也有交通法規來約束,我們舉個例子,1968年《維也納道路公約》第13條規定,駕駛員必須自始至終對車輛保持控制,所以他必須始終握著方向盤,這跟我們自動駕駛的概念是衝突的。中國可能還不是這個公約的成員,中國有自己的交規,但中國也有類似的規定,駕駛員必須始終控制著車輛,這裡想說明的一點,道路交通法規的修改也是我們目前面臨的挑戰。
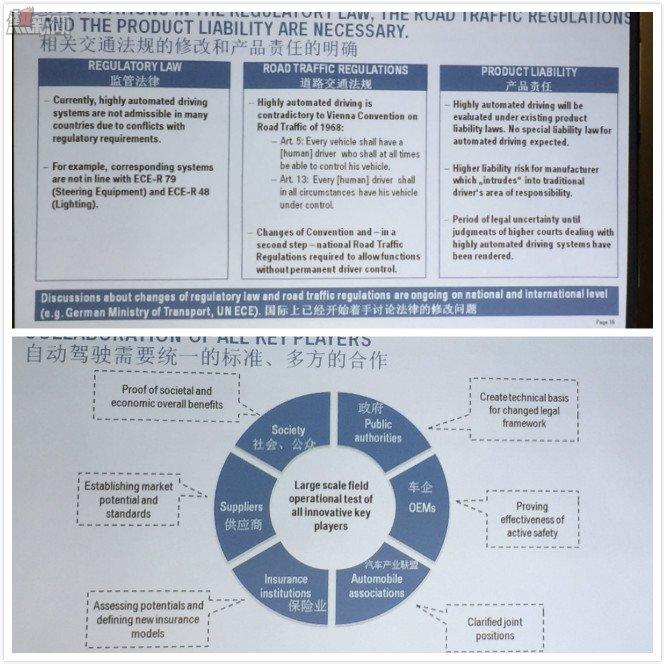
最後是關於產品的責任問題。在目前交通法規下,如果路面上出現了事故,一般情況是一個駕駛員和另外一個駕駛員爭論,到底是誰負責。在將來,如果自動駕駛的車輛在路面上發生事故,最壞的情況可能是兩個駕駛員一起起訴車廠,說你們的車沒有開好,這個責任是你們車廠的。所以考慮到這個產品責任問題,我們車廠有責任保證這個車輛能夠在所有的條件下非常好的運轉。我們經常強調安全是第一的,速度其實是排在安全的後面。我們把自動駕駛的車輛在路面上進行展示是非常小心的,因為我們不想再展示的過程中把一個不完善的技術展示給公眾,會影響公眾對自動駕駛技術的印象,其實是有害的。關於法規和產品責任,在國際上有各種各樣的研究和討論,在國內我們也跟相關部門及他們的智囊團進行共同的研究和討論,比如和交通部的智囊團一起研究自動駕駛技術將來對法規影響的問題。
我們要實現自動駕駛技術,必須有多方合作夥伴:首先,社會和公眾必須被說服,自動駕駛技術是對社會有益的,是可以接受的;第二個,政府相關部門必須要討論法律框架的修改,批准自動駕駛的車輛上路;第三個,對車企的責任,必須證明這個車輛是安全的,而且能夠對社會帶來更多的益處;第四個,對於車廠供應商,必須提供標準化的部件,為車廠生產汽車服務。汽車產業的各種聯盟是黏合車企和供應商非常好的地方,最後保險業可能也得適應自動駕駛車輛的變化,所以我們在前期會邀請保險業的人一起討論產品責任的問題,怎麼樣解決自動駕駛產品責任的問題。
From samfly
【答分歧】特別篇:如何實現高度自動駕駛(無人駕駛)